Non è facile riassumere 20 mesi di studio, impegno e, inevitalmente, tensioni in una singola pagina di un blog. Le persone che ho conosciuto, le materie che ho studiato, la difficoltà nell’incastrare tutto questo con la famiglia, il lavoro e le trasferte, semplicemente non ci stanno.
Il giorno della proclamazione Giacomo Tomezzoli, un mio compagno di corso eletto a rappresentante della classe ha letto un discorso che riassume magnificamente l’esperienza. Poiché non voglio perdere questo discorso, ho deciso di riportarlo in questa pagina.
]]>Buonasera al gradito ed egregio ospite dott. Sandro Stramare, al Presidente Visentin, al Direttore Scientifico Prof. Vinelli, ai rappresentanti della Faculty, ad Alessia e allo staff, a tutti i colleghi diplomandi, alla dott.ssa De Stefani che seguirà, a tutti voi presenti.
Cari ingegneri e non ingegneri (perché se una cosa mi è parsa chiara da subito frequentando queste aule è che questa divisione in caste esiste, una iattura per gli ingegneri), è un onore per me rappresentare i diplomandi dell’EMBA 14 e poi capirete il motivo. Non preoccupatevi, nessuna presentazione ad effetti speciali oggi, ma qualche riflessione, qualche PERCHE’. Spero capace di dare una traccia di un viaggio, importante, che abbiamo fatto e che faremo.
Per fare sintesi e farci un augurio, per raccontarci che cosa alla fine ci siamo portati a casa, ho deciso di recuperare ed adattare una storia che mi ha affascinato molto e che ritengo possa essere condivisa in questa occasione, magari qualcuno di voi l’ha già sentita. E’ una storia utilizzata nel talent management, è la storia di un ragazzino, un ragazzino che giocava a calcio per le strade e le piazze della sua città, fino ad arrivare ai campetti di periferia e poi sulla cima del mondo. La storia racconta che questo ragazzino tirasse con il piede destro, provasse – in sostanza - a fare tutto ciò che facevano i suoi coetanei. Fino al giorno in cui un signore, che lo osservava da bordo campo, gli disse: perché non provi con il piede sinistro? Scoprirai il tuo vero talento. E così fu, quel ragazzino diventò un giocatore, un campione, un fuoriclasse per l’esattezza, che arrivò a fare probabilmente il gol più bello nella storia del calcio moderno, con ben 11 tocchi di palla fatti col solo piede sinistro, il suo più autentico talento.
Lasciamolo lì, per un momento, quel ragazzino, e proviamo ora a ripercorrere un’altra storia, brevemente, quella che ci ha cambiato, quella di questi 20 mesi intensi all’interno di questo magnifico contesto.
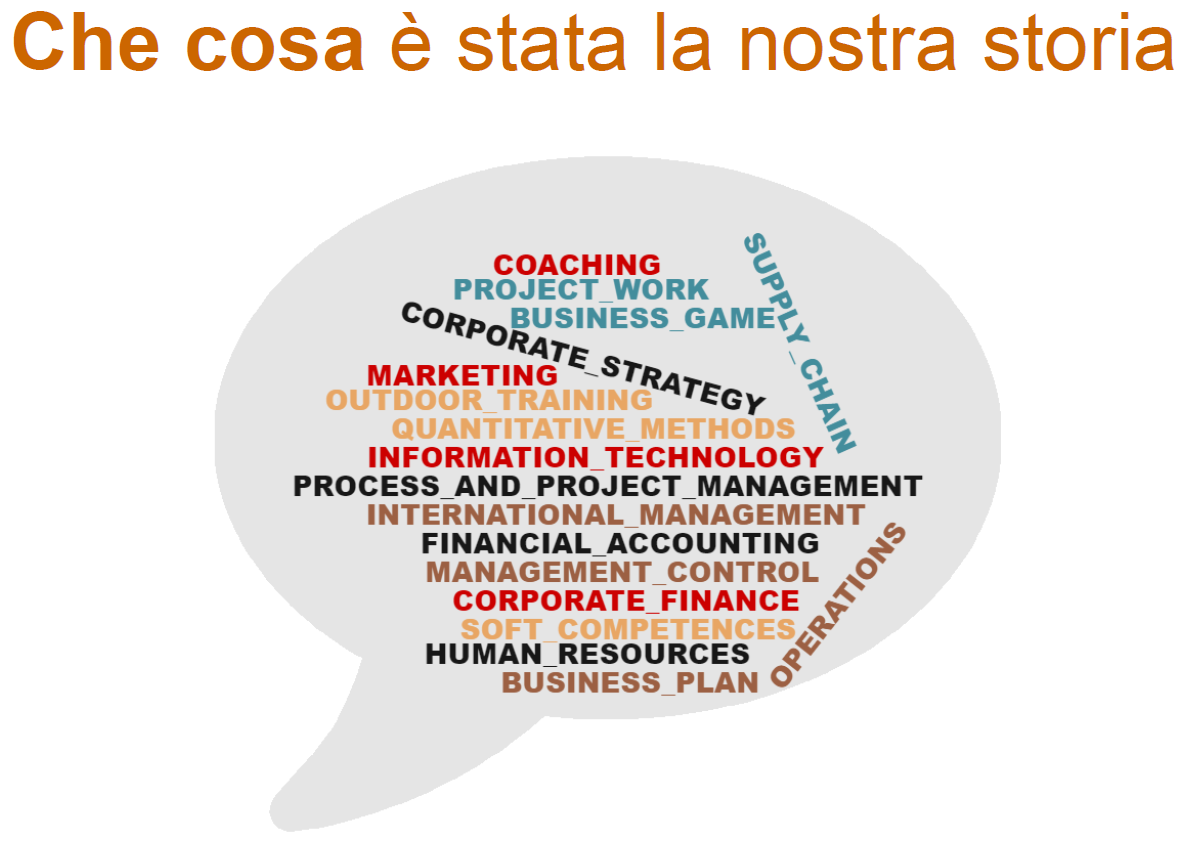
Che cosa è stato l’EMBA? I nostri amici, parenti e colleghi se lo immaginano? Quando siamo arrivati non lo sapevamo cosa sarebbe diventato per noi. In queste aule, in una delle business school più antiche d’Italia tutto ha avuto corso come farebbe un torrente in piena.
Partimmo con la contabilità d’azienda e fu subito terrorismo psicologico. Per non cadere nella trappola dell’effetto possessione la sera si ricalcavano gli appunti. Siamo passati a segmentare segmentare segmentare il mercato, per chiudere con un enciclopedico piano di marketing. Di lì a poco ci siamo cimentati con i metodi quantitativi e la matematica finanziaria, materia in cui la classe si è subito divisa in due gruppi: chi stava in apnea per più di 2 minuti e chi sapeva la matematica (io appartenevo al primo gruppo). Abbiamo costruito modelli su modelli di controllo di gestione nella calura dei mesi estivi – esattamente 12 mesi fa. Volato via il primo anno ecco arrivare la finanza, non le fiamme gialle, ma quella d’impresa. In equilibrio verticale ma precario per tutta la durata del corso abbiamo stabilito con accuratezza le opportunità finanziarie di una società biomedicale. Via di corsa quindi verso il modulo più lungo, le operation e la supply chian, dove siamo stati deliziati con addirittura una lezione aggiuntiva e dove abbiamo attraversato idealmente tutte le fasi della catana del valore. Siamo quindi passati al modulo delle risorse umane, dove imparammo a selezionare, organizzare e valutare… e dove siamo stati valutati (non facile come sembrava). Infine la strategia d’impresa, l’oceano blu, il posizionamento, i modelli di business, le fusioni e le acquisizioni. Il docente, avvisato dai colleghi, ci ha pregato di non essere anch’egli travolto dalla nostra tracotanza (vi prego poche paginette, ci ha detto).
Ma fosse solo questo: un business game dominato dalla HairWash, un business plan combattuto fino alla fine dalla Froota e dalla Tonazzo, un project work dove tutti hanno cercato di stare con onore alle spalle della Hachiko team. Ma poi il project management, l’international management, l’information technology, le diversità culturali con gli abitanti dell’isola di Morenia (che qui non imito), le competenze trasversali, il publick speaking, la gestione dello stress, i lavori di gruppo bendati, quelli con le assi di legno (e qui sorvoliamo), con i ponti di carta, l’orientamento nei boschi di Tretto, la scrittura di un libro a 48 mani, la realizzazione di un gioco in scatola, Fred sull’iceberg che si stava sciogliendo, il beer game, gli incontri di coaching, la gestione della complessità. Basta, non c’era più spazio. Nemmeno Athena, dea greca della Sapienza avrebbe retto a tanto.
Se è difficile spiegare COSA sia stato proviamo allora a raccontarvi COME è stato questo MBA? Non posso certo dirlo io, lo possono solo dire tutti loro, i miei colleghi.
Che cosa è stato l’EMBA? I nostri amici, parenti e colleghi se lo immaginano? Quando siamo arrivati non lo sapevamo cosa sarebbe diventato per noi. In queste aule, in una delle business school più antiche d’Italia tutto ha avuto corso come farebbe un torrente in piena.
- Acceleratore per Umberto ➡️ lavoratore instancabile
- Arricchente per Giacomo ➡️ fortunato e spero degno portavoce quest’oggi
- Autovalutazione per Enrico Z. ➡️ grande uomo di gruppo
- Coinvolgente per Marco ➡️ e i suoi puntuali e precisi punti di vista
- Complementativo per Graziano ➡️ pressione e passione nelle vene
- Conferma per Piazza ➡️ unico commerciale a cui interessa il viaggio oltre che la meta
- Confronto per Ketty ➡️ imprenditrice, linguista e ottimista
- Consapevolezza per Sabrina ➡️ super direttiva e affidabile
- Destabilizzante per Elena ➡️ visione strategica e decisione
- Edificante per Loris ➡️ alto potenziale, uno che vende armi al Vaticano
- Entusiasmante per Valentina ➡️ determinazione allo stato puro
- Fenomenale per Fabio ➡️ il pragmatismo e l’azione in persona
- Illuminante per Lorenzo ➡️ da cui la ormai famosa matrice di Lorenz
- Impegnativo per Riccardo B ➡️ uomo quadrato che quadra i conti, di tutti oserei dire
- Introspettivo per Paolo ➡️ il maestro, il sensei, venuto da Combai
- Neurostimolante per Soncin ➡️ manager veloce e sempre sul pezzo
- Pertinente per Giulia ➡️ preparata e consapevole non solo nello stile
- Prospettiva per Carlo ➡️ DNA da acuto osservatore
- Rete iperspaziale per Michele ➡️ loquace anticonformista
- Sicurezza per Ciuffo ➡️ sintesi perfetta di creatività ed ingegneria
- Stimolante per Sturli ➡️ professionista rigoroso e affidabile
- Stupefacente per Federico ➡️ il tecnico divenuto Manager
- Trasformante per Ottavio ➡️ ingegnere tutto d’un pezzo, però ora trasformato
- Variopinto per Manuel ➡️ il nostro saggio di classe, un sussidiario
Non ci crederete ma 24 professionisti – che mi sono permesso di ricordare - mi hanno consegnato 24 definizioni diverse e bellissime, alle quali dedicherei un applauso. Un bel quadro che consegniamo al CUOA e che può essere usato per sponsorizzare le prossime edizioni dell’EMBA.
Tuttavia queste belle definizioni non sono sufficienti. Perché ognuno ha sintetizzato all’estremo concetti e sentimenti. Perché ognuno è arrivato qui con le proprie aspettative, perché ognuno ha interpretato questo percorso come voleva, trascinato dagli altri, trascinando gli altri, ma anche indipendentemente dagli altri.
Questa è stata una classe tosta, che dopo il primo giorno di presentazioni si è tolta subito di dosso i timori è ha iniziato a testa bassa ciò che si sarebbe dovuto fare. Una classe tosta, mi permetto di affermare, perché questo EMBA è stato tosto, nei contenuti, nelle relazioni, nelle dinamiche, nell’interfacciarsi con la faculty, che ha risposto con prontezza alle sollecitazioni, quando ricevute. C’è stato poco di scontato e tanto di guadagnato.
Che cosa ci portiamo a casa? Possiamo tornare ora a quel ragazzino su quel campetto di periferia, archètipo di una storia che oggi ci appartiene più che mai.
Tutti noi siamo arrivati qui che sapevamo usare il nostro piede destro, anche bene direi: gli ingegneri di produzione sapevano fare gli ingegneri di produzione, i commerciali sapevano vendere, i tecnici sapevano fare i tecnici, i contabili sapevano che investimenti a lungo richiedono fonti a lungo, e così via. Siamo arrivati qui perché ci siamo resi conto che non volevamo più incaponirci solo con il nostro piede destro – questa è la verità - avevamo bisogno di coltivare nuovi talenti, perché solo con nuovi talenti potevamo puntare all’eccellenza. E così oggi chi sapeva gestire reparti di produzione sa anche di contabilità aziendale, chi gestiva una rete di fornitura sa anche comprendere le dinamiche del mercato, chi aveva cura dei clienti comprende anche le esigenze di un conto economico e di uno stabilimento produttivo, chi faceva marketing sa anche come è fatta un’impresa oltre che come sia fatto un sondaggio. Tutti hanno aggiunto talenti, hanno imparato ad usare meglio il loro piede destro, certamente, ma possono ambire a tirare anche con il loro piede sinistro, chissà forse fino ad arrivare un giorno anch’essi sulla cima del mondo.
E allora cari colleghi, se è vero – come ci hanno detto - che l’innovazione è una disobbedienza andata a buon fine, noi disobbedimmo a noi stessi e alla prassi comune il giorno che siamo giunti qui e che abbiamo deciso di volerci impossessare di un po’ di innovazione, di qualche nuovo talento. E’ giusto che ora ci proviamo: chi riuscirà a segnare all’incrocio dei pali, chi colpirà la traversa, chi sfiorerà il goal, l’importante è che si continui ad entrare continuamente in contatto con il nostro piede sinistro, con i nostri nuovi talenti.
Fatemi dire: i nostri figli nel 40% dei casi potrebbero fare un lavoro che oggi nemmeno esiste.
Vediamo se da qualcuno di questi FANTASTICI MANAGER MANCINI nascerà un’innovazione tanto importante.
Lo possiamo fare per noi stessi, per le aziende e i clienti che crederanno in noi, e per le nostre famiglie, le persone che ci sono state vicine in questi quasi 20 mesi di fatiche. Anche loro come noi hanno vissuto momenti alterni, alti e bassi, entusiasmi e tensioni. Facciamogli allora un caloroso applauso…
Grazie al Prof. Vinelli per la professionalità, ad Alessia e allo staff per quanto fatto, ai docenti tutti. Grazie ai miei colleghi ai quali rivolgo un invito: mai perdersi di vista!!!
e grazie a tutti voi per aver ascoltato un manager mancino.
Giacomo Tomezzoli per gli EMBA 14.